-
 Deutsch
Deutsch
- Metric (mm, Kg, ℃)
Hinweise zu den Abkürzungen
Ws= Tragfähigkeit der Schwenkrolle
Wf= Tragfähigkeit der Bockrolle
WT=Maximale Tragfähigkeit
P= Leergewicht (Tara) des Rollwagens
Nachstehend zeigen wir Ihnen alle mögliche Varianten für die Befestigung der Laufrollen:
Variante A
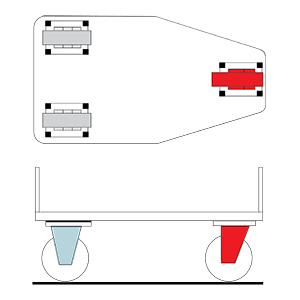 |
2 Bockrollen + 1 Lenkrolle
Bevorzugt bei kleinen flexiblen Konstruktionen mit leichtem Gewicht. Die Bedienung findet durch die Seite der Lenkrolle statt. Ws= (WT+P) x 0,4 Wf= (WT+P) x 0,35 |
Variante B
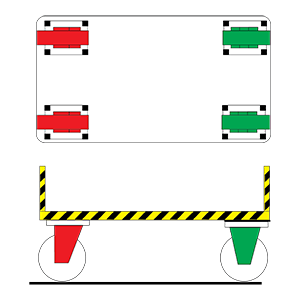 |
2 Lenkrollen + 2 Bockrollen an den Kanten des Rollwagens
Bevorzugt bei relative hohen Lasten und langen Strecken. Die Bedienung findet durch die Seite der Lenkrolle statt. Ws= (WT+P) x 0,35 Wf= (WT+P) x 0,35 |
Variante C
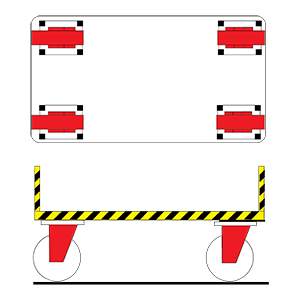 |
4 Lenkrollen an den Kanten des Rollwagens
Bevorzugt bei Anwendungen mit höchster Flexibilität, doch bei schweren Lasten wird es nicht sehr empfohlen für lange Strecken. Die Bedienung findet an jeder Seite statt Ws= (WT+P) x 0,35 |
Variante D
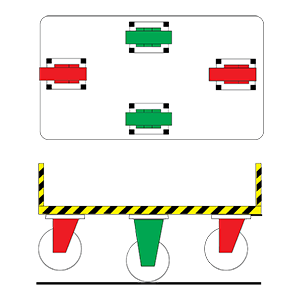 |
2 Lenkrollen + 2 Bockrolle in der Mitte der Rollwagenseiten
Bevorzugt für flexible Konstruktionen für lange Strecken auf Fußböden mit Rinnen und Rampen. Die Bockrollen sind meistens höher als die Schwenkrollen angebracht, damit die Konstruktion sich auf diesen Rollen stützen kann. Die Bedienung findet an der Seite der Lenkrollen statt. Ws= (WT+P) x 0,35 Wf= (WT+P) x 0,50 |
Variante E
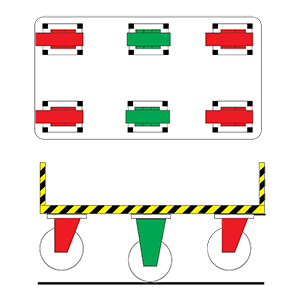 |
2 Bockrollen in der Mitte der langen Seite + 4 Schwenkrollen an den Kanten des Rollwagens
Bevorzugt für flexible und stabile Konstruktionen für lange Strecken auf Fußböden mit Rinnen und Rampen. Die Bockrollen sind meistens höher als die Schwenkrollen angebracht, damit die Konstruktion sich auf diesen Rollen stützen kann. Die Bedienung findet an der Seite der Schwenkrollen statt. Ws= (WT+P) x 0,35 Wf= (WT+P) x 0,50 |
Variante F
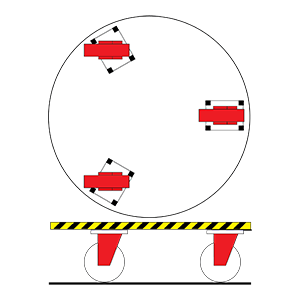 |
3 Lenkrollen in Dreieckeinstellung
Bevorzugt für Rundrollwagen oder Fässer Ws= (WT+P) x 0,35 |

Vermerk:
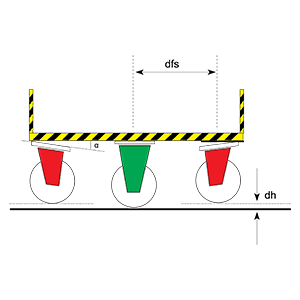
Bei Varianten D und E soll die Anpassungs- Oberplatte der Schwenkrolle nicht in einer parallelen Position zum Rollwagenboden sein, sondern muss es die richtige Neigung haben um horizontal zu liegen während das Rad den Boden berührt.
tan a = dh/dfs, wo
dh= Gesamthöheabweichung mit Lenkrollen und Bockrollen.
dfs= Abstand zwischen Mittenpunkten der Anpassungs-Oberplatten der Lenkrollen zu den Bockrollen.
Über uns
Neueste Nachrichten
